1. Under Water Robot Inertial Navigation Applications
Inertial Navigation Systems (INS) are often used in Underwater Robot applications to provide high-precision measurements of the robot's motion and orientation. INS typically consists of an Inertial Measurement Unit (IMU) and a navigation algorithm that uses the IMU data to estimate the robot's position, velocity, and orientation. This information can be used to improve the accuracy and reliability of navigation in challenging underwater environments.
Some specific applications of INS in underwater robot navigation include:
1. Underwater exploration: INS can be used to enable autonomous navigation of underwater robots, allowing them to explore underwater environments without the need for human intervention. INS can also be used to improve the accuracy and reliability of navigation in environments where GPS signals may be weak or unavailable.
2. Underwater inspection: INS can be used to provide high-precision measurements of a robot's motion and orientation during underwater inspection tasks, such as inspecting pipelines or underwater structures. This can improve the accuracy of inspection data and reduce the risk of damage to the robot or the environment.
3. Underwater mapping: INS can be used to provide high-precision measurements of the robot's motion and orientation during underwater mapping tasks, such as mapping the seafloor or underwater structures. This information can be used to create detailed maps of underwater environments, which can be used for scientific research or resource exploration.
4. Underwater construction: INS can be used to provide high-precision measurements of a robot's motion and orientation during underwater construction tasks, such as installing pipelines or underwater structures. This can improve the accuracy and efficiency of construction operations and reduce the risk of damage to the environment.
Overall, the use of INS in underwater robot applications can improve the accuracy, efficiency, and safety of underwater navigation and operations. By providing high-precision measurements of robot motion and orientation, INS can enable more precise and reliable navigation, mapping, inspection, and construction tasks in challenging underwater environments.
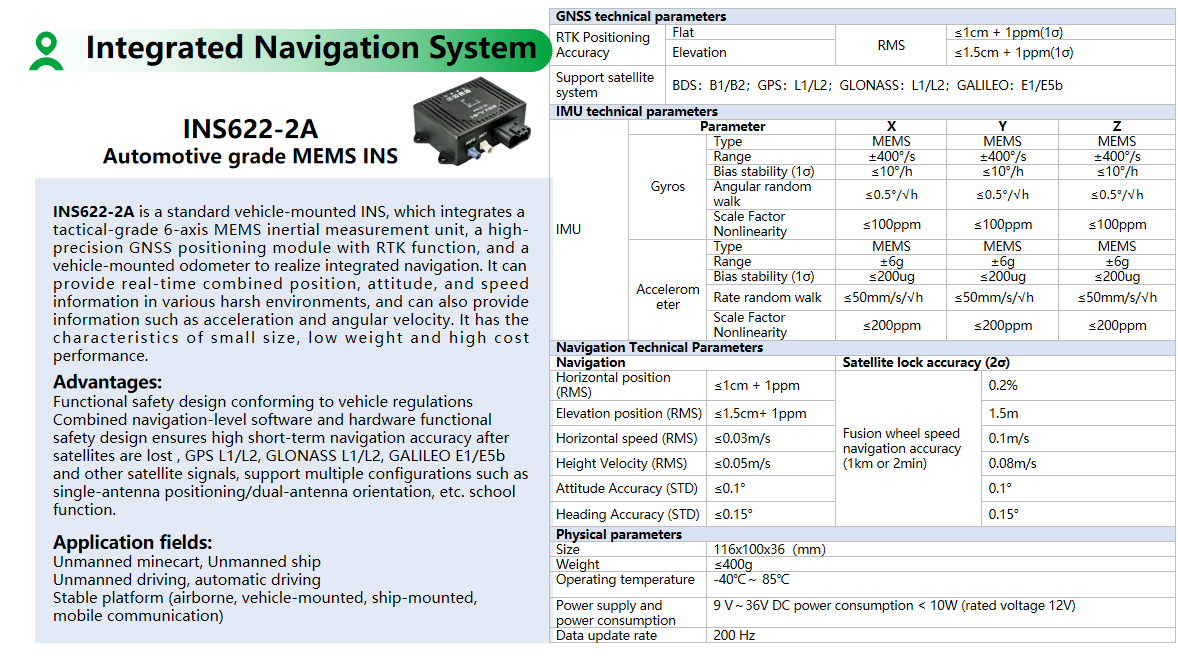
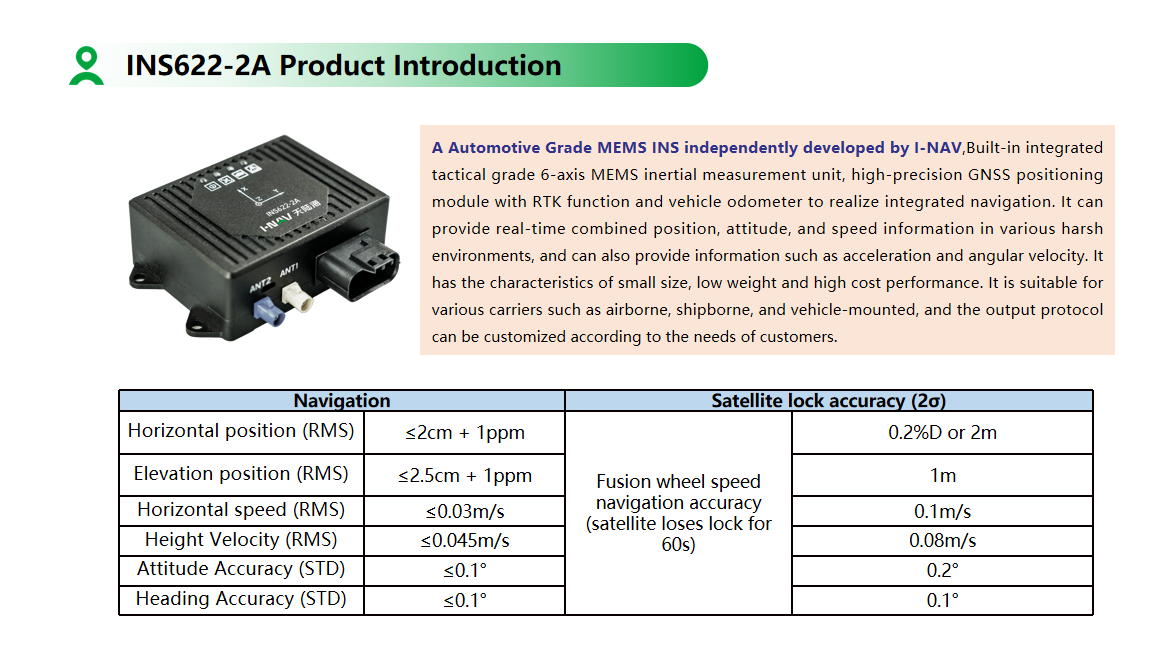
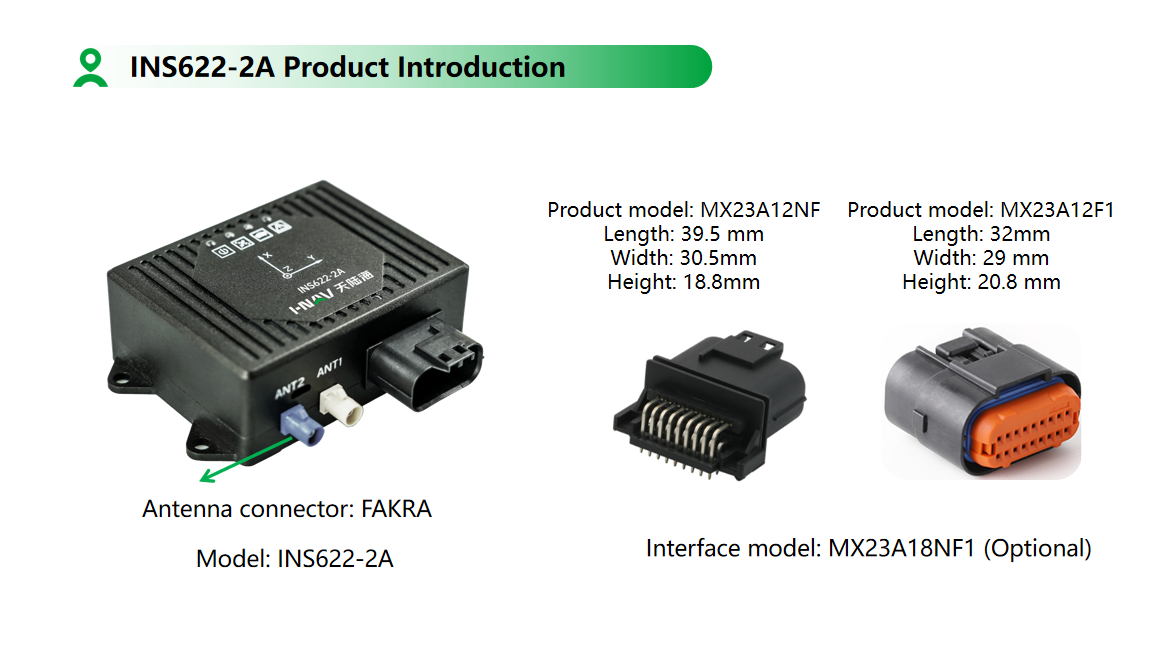
2. Product Introduction
1. Under Water Robot Inertial Navigation Applications
Inertial Navigation Systems (INS) are often used in Underwater Robot applications to provide high-precision measurements of the robot's motion and orientation. INS typically consists of an Inertial Measurement Unit (IMU) and a navigation algorithm that uses the IMU data to estimate the robot's position, velocity, and orientation. This information can be used to improve the accuracy and reliability of navigation in challenging underwater environments.
Some specific applications of INS in underwater robot navigation include:
1. Underwater exploration: INS can be used to enable autonomous navigation of underwater robots, allowing them to explore underwater environments without the need for human intervention. INS can also be used to improve the accuracy and reliability of navigation in environments where GPS signals may be weak or unavailable.
2. Underwater inspection: INS can be used to provide high-precision measurements of a robot's motion and orientation during underwater inspection tasks, such as inspecting pipelines or underwater structures. This can improve the accuracy of inspection data and reduce the risk of damage to the robot or the environment.
3. Underwater mapping: INS can be used to provide high-precision measurements of the robot's motion and orientation during underwater mapping tasks, such as mapping the seafloor or underwater structures. This information can be used to create detailed maps of underwater environments, which can be used for scientific research or resource exploration.
4. Underwater construction: INS can be used to provide high-precision measurements of a robot's motion and orientation during underwater construction tasks, such as installing pipelines or underwater structures. This can improve the accuracy and efficiency of construction operations and reduce the risk of damage to the environment.
Overall, the use of INS in underwater robot applications can improve the accuracy, efficiency, and safety of underwater navigation and operations. By providing high-precision measurements of robot motion and orientation, INS can enable more precise and reliable navigation, mapping, inspection, and construction tasks in challenging underwater environments.
2. Product Introduction